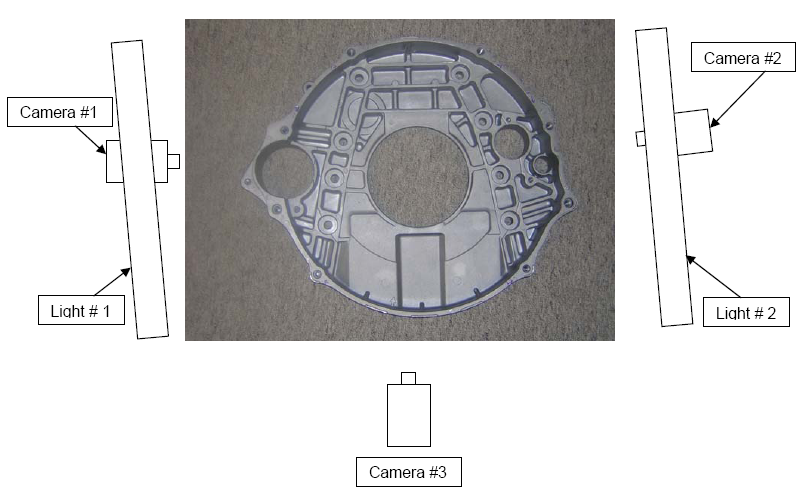
铸件检测发表时间:2020-09-11 11:29 应用描述: 所要检测的物体为金属铸件,在某些铸槽的规定位置都有安装孔。视觉系统的任务就是检测这些安装孔是否在规定的铸槽内。 摘要: 虽然iNspect的软件工具同样能够轻易地完成检测任务,使用Sherlock软件来进行视觉处理能使检测速度低于100ms.
光学系统位置: Δ 相机镜头和铸件间的高度距离是9600mm; Δ 铸件边缘和相机镜头间距离是76mm; Δ 光源的高度是1016mm; Δ 铸件边缘和光源间距离是76mm; Δ 光源角度为40度; 软件工具设置: 搜索-(2)在每个相机的视野图像内用搜索算法查找零件并定位所要寻找的感兴趣区域的位置,在下面的视频显示图像框内标注出搜索的ROI。 均值工具-通过平均值算法寻找表面线反射的光线,在下面的视频显示图像框内标注出每个孔均值ROI。
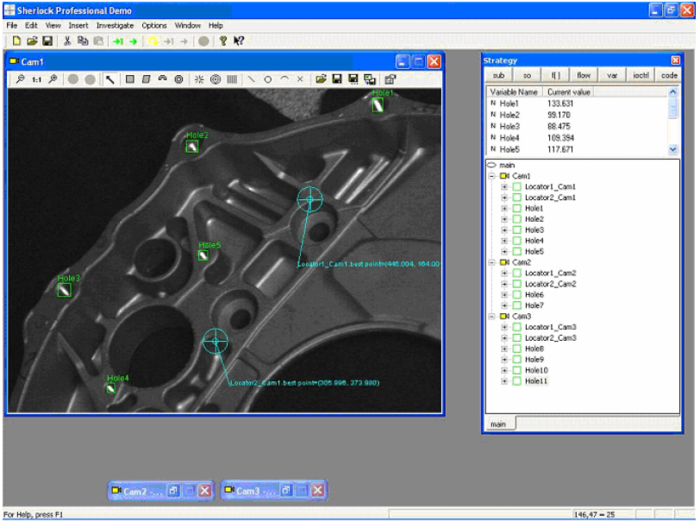
相机1显示合格零件时软件界面屏幕抓取图像如下:
相机1检测描述:这里包括2个搜索算法、定位标签、在零件上寻找两个已定义的区域来定位感兴趣区域,进而判断螺纹线的存在。感兴趣区域利用平均算法从螺纹线寻找反射区,并在相机1的图像上标注“孔(1-5)”。每个检测结果存储到“策略窗口”的标注孔(1-5)对应的变量中。对每个孔来说,当感兴趣区域显示为绿色是表示合格。
相机1检测不合格零件时的软件界面屏幕抓图
相机1检测描述:均值算法正在进行一个比螺纹线存在的时候更低的识别测量。对每个孔来说,当感兴趣区域显示为红色是表示不合格。
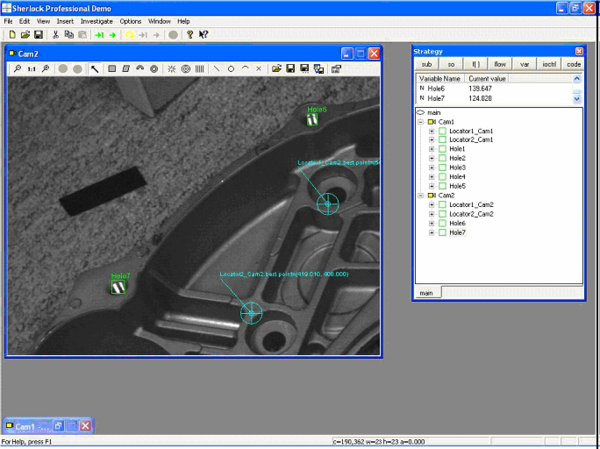
相机2显示合格零件时软件界面屏幕抓取图像如下:
相机2检测描述:这里使用了两次搜索算法、定位标签、在零件上寻找两个已定义的区域来定位感兴趣区域,进而判断螺纹线的存在。感兴趣区域利用平均算法从螺纹线寻找反射区,并在相机2的图像上标注“孔(6&7)”。每个检测结果存储到“策略窗口”的标注孔6&7对应的变量中。对每个孔来说,当感兴趣区域显示为绿色是表示合格。
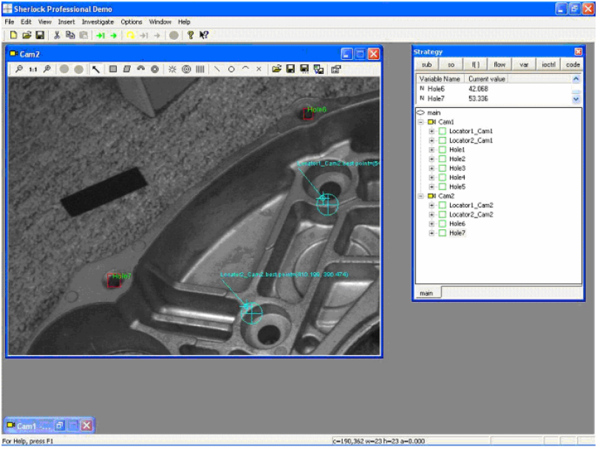
相机2检测不合格零件时的软件界面屏幕抓图
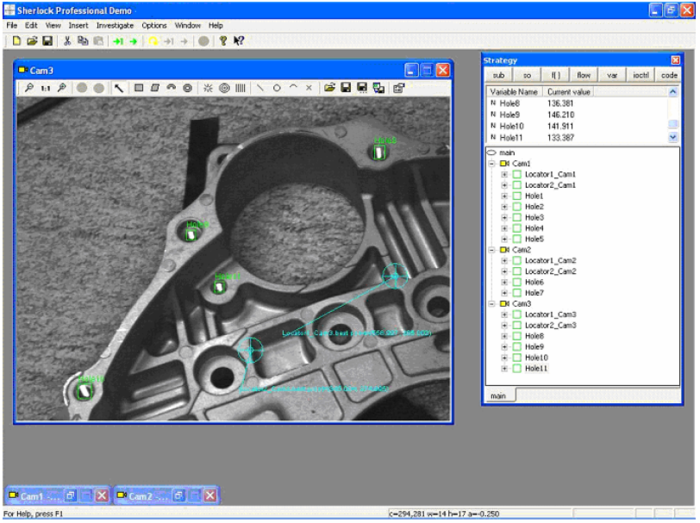
相机2检测描述:均值算法正在进行一个比螺纹线存在的时候更低的识别测量。对每个孔来说,当感兴趣区域显示为红色是表示不合格。 相机3显示合格零件时软件界面屏幕抓取图像如下:
相机3检测描述:这里使用了两次搜索算法、定位标签、在零件上寻找两个已定义的区域来定位感兴趣区域,进而判断螺纹线的存在。感兴趣区域利用平均算法从螺纹线寻找反射区,并在相机3的图像上标注“孔(8-11)”。每个检测结果存储到“策略窗口”的标注孔8-11对应的变量中。对每个孔来说,当感兴趣区域显示为绿色是表示合格。
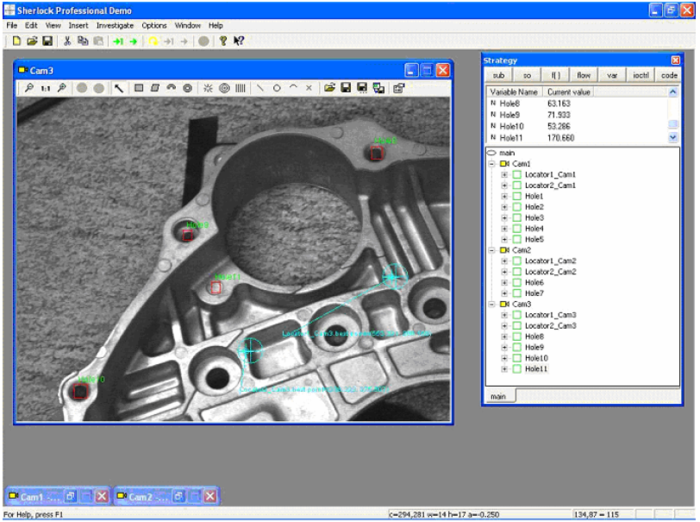
相机3检测不合格零件时的软件界面屏幕抓图
相机3检测描述:均值算法正在进行一个比螺纹线存在的时候更低的识别测量。对每个孔来说,当感兴趣区域显示为红色是表示不合格。 视觉系统的输出: NetSight II视觉系统能经过内建的数字I/O、串口或是以太网口输出通过或不通过信号。 视觉系统的局限性: 1.检测会收到周围环境光的影响。建议在检测区域建立隔离设备隔离环境光。 2.铸件必须正确的放置,使螺纹孔能在相机的视野范围内。 |